



EH Series AZ Equipped

Grip : Reliably grip loads that are easily deform or breaks
Freely set the gripping force, grippping time and speed according to the object being gripped.
Safely and reliably grip objects that easily break, like glass and objects that easily deform like plastic and sponges
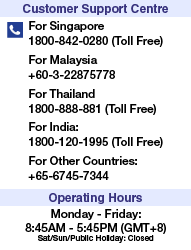
Quick Approach, Slow Grip.
The motor approaches the load at high speed. The motor decelerates just before hitting the surface at low speed
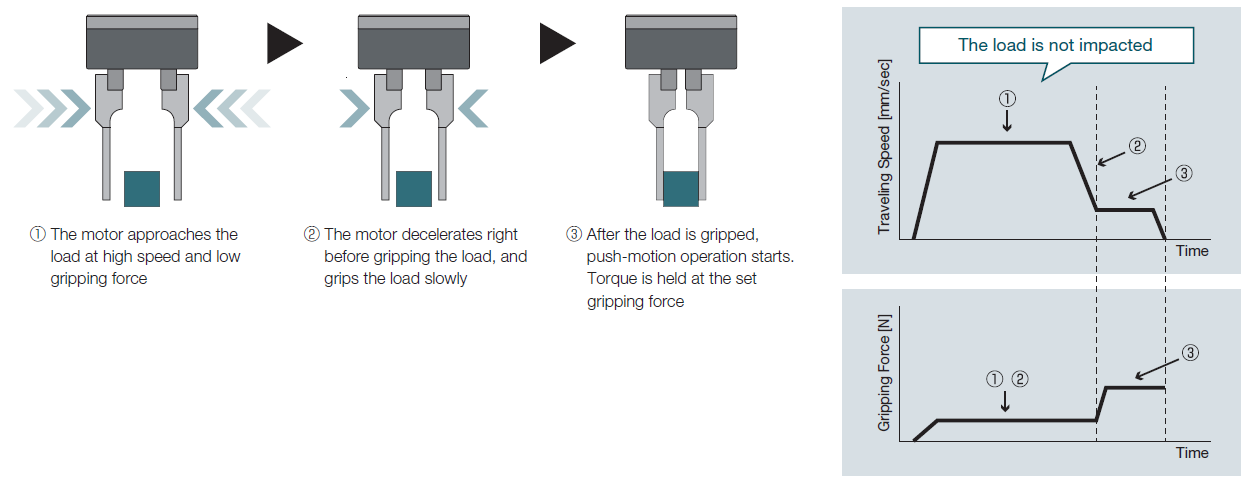
Grips at low gripping Force, then gradually increases the force.
Push force and timing can be easily changed
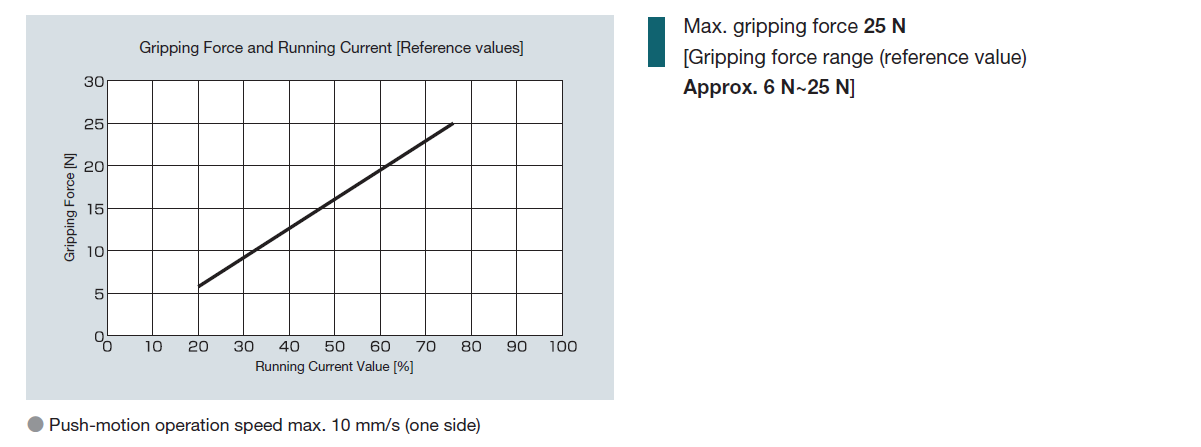
Gripping Force Characteristics during push-motion operation
The gripping movement of the electric gripper depends on the push-motion operation.The push force (gripping force) is set according to the running current of the motor.
Coordinate :The Direction and Position of the Load can be Coordinated.
The minimum travel amount of the finger is 0.02 mm, so the direction and position of the loads can be coordinated by gripping them according to their size.

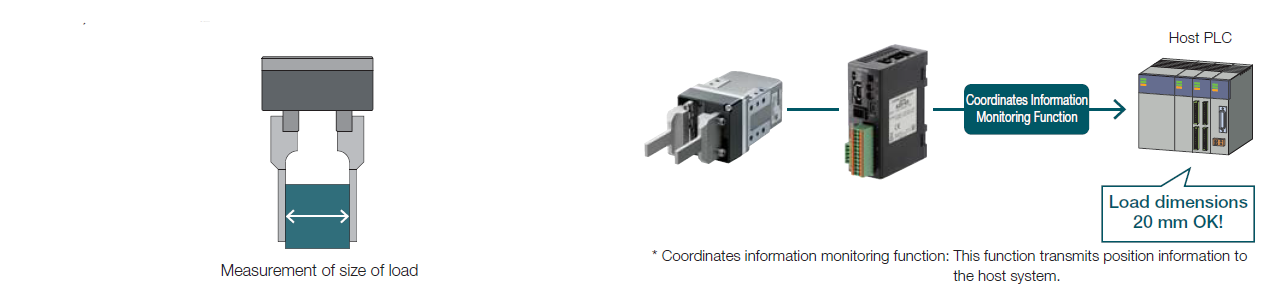
Measure : The Size of the Load can be Confirmed without an External Sensor.
The Size and Presence of a Load are Determined within the Operational Range of the Finger
The operational range of the finger is confirmed by the output signal (TLC output, AREA output) from the driver, allowing the size and presence of a load to be determined.
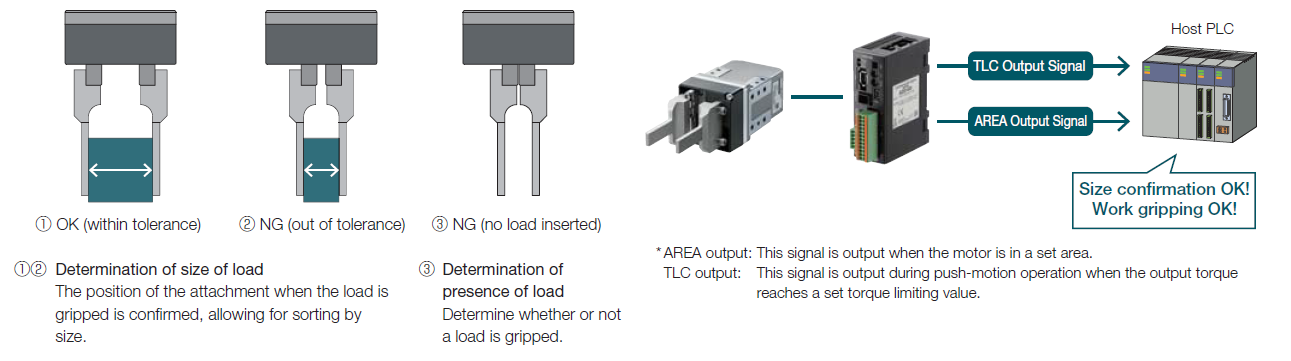
Monitor the Position Information from the Gripper to Measure Size
The driver coordinates information, monitoring function loads, coordinates information from the electric gripper into the host PLC, allowing the size of the load to be measured.