SCARA Robots (Horizontally Articulated Robots)
Example of a Custom-Built Robot
Actual Equipment Example SCARA Robot
Overview Equipment Configuration Points Support from the Product Selection Stage to Equipment Design
| Configuration Points for Each Axis | 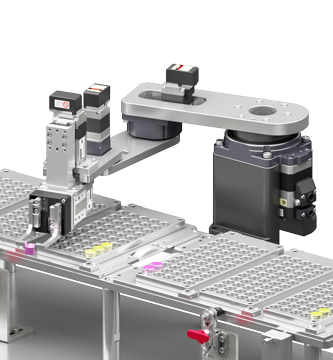 |
Controller MRC01 |
|---|
Controller (Robot Controller) Articulated Axis, End Effector
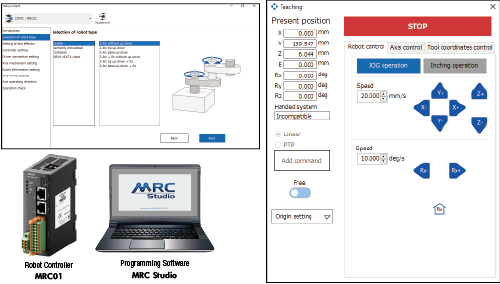
Robot Controller MRC01
Easily Introduce a Custom-Built Robot into an Existing System
Coordination between the MRC01 and host system is directly controlled via EtherNet/IP. It is easy to introduce a custom-built robot into an existing control system without making major changes to the equipment.
● EtherNet/IP is a trademark of ODVA.

*1 The MRC01 can also be operated with an I/O connection (no host device).
*2 From the MRC01 to the AZ Series driver is controlled via RS-485 communication.
Easy Setup, Even for Beginners
| The MRC01 can be easily set up from the initial settings to the operation program even without specialized knowledge of programming language, etc. Selecting the robot type and the initial settings for entering the mechanism information, etc. are easy using the wizard. The operation program also allows target commands to be added while moving the custom-built robot with teaching operations. When our young equipment designers tried using it for the first time, they created a program using teaching in about 2 hours because multiple axes can be set with one command. ● The programming software MRC Studio and EDS files can be downloaded here. |
 |
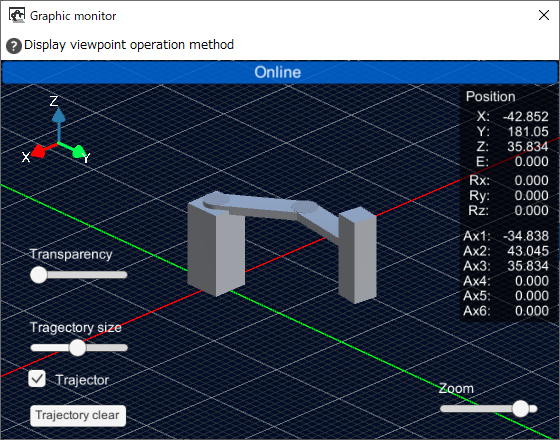
Operations can be Checked via 3D Simulations Online
| The custom-built robot’s operation program can be checked with a 3D simulator without actually driving the motor. No host PLC needs to be connected to run simulations. Prevent the robot from moving in the opposite direction or being damaged by moving too far, before they happen. ● Cannot be used offline. |
 |
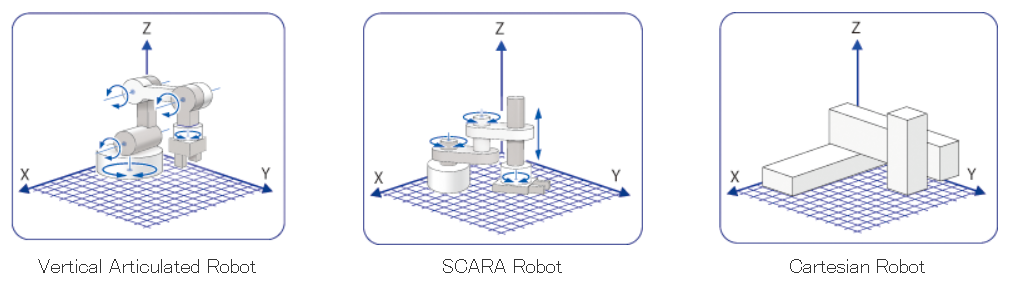
The End Effector Axis Can Also be Controlled
| Compatible with the typical structures of industrial robots: vertical articulated robots, SCARA robots, and Cartesian robots. The end effector can also be controlled with the MRC01, contributing to system space saving, reduced wiring, and lower costs. |
 |
Compatible with a Wide Variety of Products
| Compatible with the AZ Series and the series’ equipped linear and rotary actuators. The full product line also allowed for robot design with a high degree of freedom according to the type of robot to be built. |
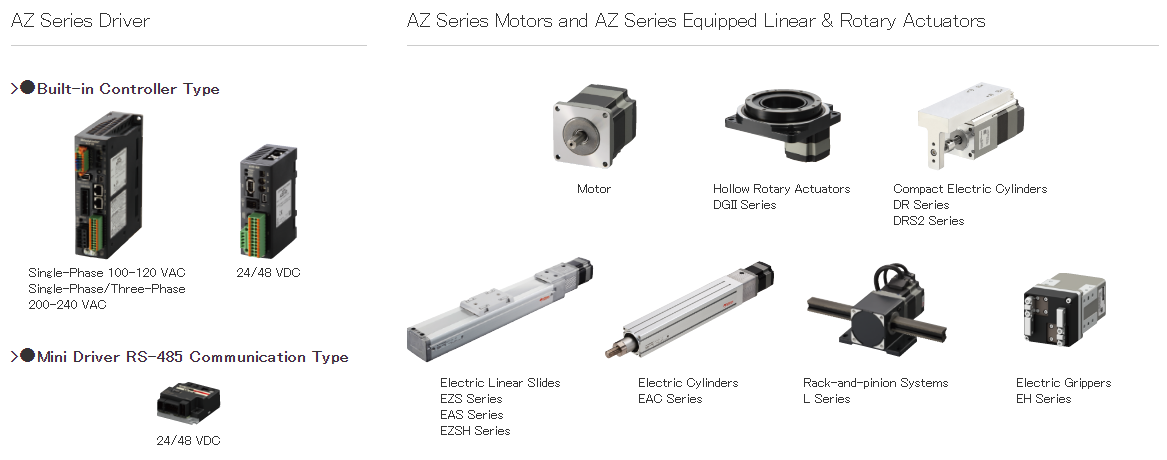 |
Compatible Products
 |
This robot controller can easily introduce and control a custom-built robot in three steps: Initial settings, Operation programming, and Operation check. It can be connected to AZ Series motors and AZ Series equipped linear and rotary actuators. |